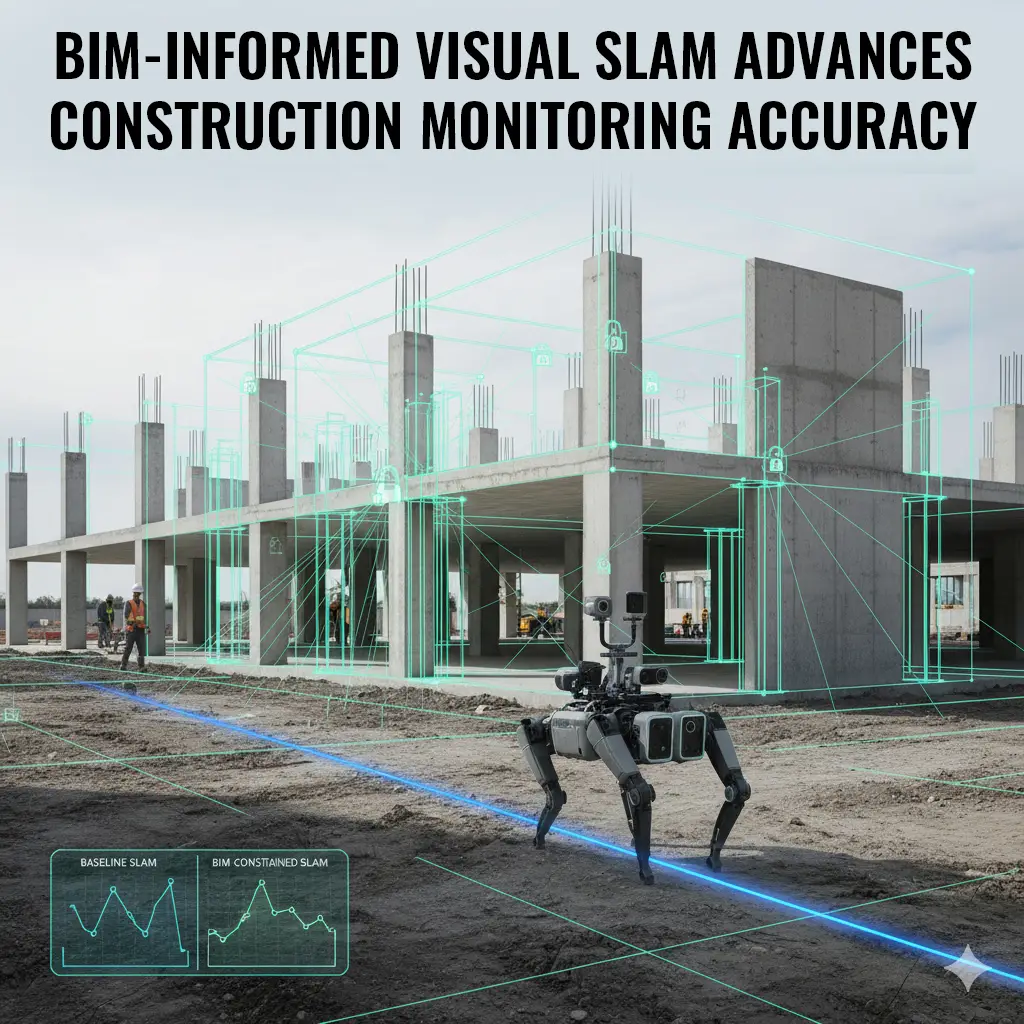
BIM-Informed Visual SLAM Advances Construction Monitoring Accuracy
October 17, 2025
2 Min Read
Researchers have introduced a novel visual SLAM (Simultaneous Localization and Mapping) method that integrates BIM as a prior structural model, significantly improving alignment between the as-built and as-planned environments.
Key Innovation
Rather than relying solely on visual features, the system continuously matches detected walls and planes to the BIM model. These constraints feed back into the SLAM optimization, reducing drift and error.
Performance Gains
In real-world tests, the BIM-constrained method achieved average 23.7% lower trajectory error and 7.1% reduced map RMSE compared to baseline visual SLAM techniques. This makes monitoring in dynamic, incomplete construction sites more reliable and robust.
Why It Matters
The approach bridges the classical gap between digital models and evolving construction reality. By anchoring mapping to known BIM geometry, you help ensure that visual tracking stays stable even in challenging site conditions (low texture, occlusions). This holds promise for better as-built verification, progress tracking, and automated site QA.